DYNAMIQUE DU NANOSATELLITE LIBRE
ACTIONS DUES A LA ROUE ET POSSIBLE ZONE D'INSTABILITE
I LES
EQUATIONS DE LA MECANIQUE :
1°) REPERES UTILES :
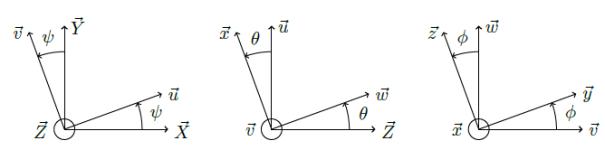
Sans refaire les figures:
1 - Repère inertiel Ra
2- Repère orbital R, avec X suivant la vitesse tangente à
l'orbite, Z suivant le zénith, Y
complétant la base ( normal au plan orbital )
3- Repère satellite Rs = ( x y z ), lié à la structure rigide. C'est le repère dans lequel
on écrit les équations du SCA seul, car l'orbite n'est pas contrôlée.
4 - u1, u2, u3 directions
unitaires de 3 roues éventuelles ( notre cas ne comportera qu'une seule roue
suivant l'axe tangage y )
2°) DONNEES:
1 - Matrice d'inertie du satellite, roue supposées bloquée
sur le satellite S
2- Roue de réaction:
|
Moment
cinétique |
18
10-3 Nms |
|
|
Vitesse
max |
6000
t/mn |
Qui
nécessitera une désaturation |
|
Masse |
150
g |
|
|
Moment
inertie axial estimé avec une masse de 140 g |
3.2 10-3 m²-kg |
|
|
Couple |
6 10-3 Nm |
J dw/dt =C è
dw/dt = 200 rd/s² |
J moment d'inertie axial de la roue
![]()
Remarque :
Avec une accélération angulaire de 200 rd/s, pour atteindre
6000 tours/minute, en partant de -6000 t/mn, il faut un temps de fonctionnement
total de 60 s.
Il faut donc prévoir une désaturation après un nombre d'impulsions de de durée totale 60 s.
3 - Magnétocoupleurs :
Trois de prévus, un par axe, le moment magnétique total est M
fournissant avec le champ magnétique terrestre un moment de commande
![]()
Sur l'orbite prévue, héliosynchrone à 817 km du sol, le
maximum de champ magnétique est d'environ ( pour le modèle numérique approché
) de 43 10-6 tesla
Avec un moment magnétique de 0.1 Am², le couple maximum
sera de 43 10-7 Nm
( à comparer à la roue !!!)
Le graphe ci-dessous donne une période de révolution, avec
passage à t=0 au nœud ascendant.

3°) LE THEOREME DU MOMENT CINETIQUE :
1 - Les
angles :
L'attitude
du satellite est représentée par 3 angles
 :
:
Classiquement
Roulis f
mesuré autour de x ( voisin de X
lorsque les angles sont petits)
Tangage q
mesuré autour de b ( voisin de
Y lorsque les angles sont petits)
Lacet y mesuré
autour de Z
2 -La rotation
:
La rotation absolue
est ( compte tenu de la rotation orbitale w0
)
![]()
![]()
![]()

La rotation
qu'il faut annuler quand on souhaite obtenir un pointage Terre parfait
est la rotation relative au repère orbital de composantes en roulis,
tangage et lacet:
![]()
![]()
![]()
Dans
le cas des petits angles en pointage fin ou en configuration
nominale sous surveillance par SCA
|
|
|
|
|
|
|
|
|
NB1: Bien évidemment, on aurait pu utiliser les angles
d'Euler ou une représentation par un quaternion d'attitude.
NB2 : Pour une orbite héliosynchrone, il faudrait de plus
tenir compte de la rotation de 0.98°/jour du plan de l'orbite, autour de l'axe
nord-sud. Dans un premier temps nous n'en tenons pas compte.
3°) EQUATIONS SATELLITE:
a) Le moment cinétique complet satellite + roue
comprend 2 termes:
|
Celui
Hs du satellite avec la roue supposée bloquée sur ses paliers |
|
|
Celui
supplémentaire HR de la roue, de moment d'inertie J et de vitesse angulaire w
par rapport au satellite |
|
b) Couples externes appliqués au satellite complet:
Dans notre cas, il n'y a pas de moteurs et donc il
n'intervient que :
|
- Le couple perturbateur aérodynamique au sens large - Le couple perturbateur du au gradient de gravité - Le couple perturbateur provenant de la pression de
radiation solaire - Le couple perturbateur ayant pour origine le moment
magnétique résiduel résultant des courants dans l'électronique de
bord … |
Couple
perturbateur résultant noté:
|
|
- -Le couple
de commande résultant de l'interaction programmée des magnétocoupleurs
avec le champ magnétique terrestre. - Le moment magnétique est
|
|
NB : Le calcul du couple de commande magnétique, suppose la
connaissance à bord des composantes du champ magnétique soit :
-
Sous forme
analytique avec utilisation de la position ( donc restitution d'attitude )
-
En utilisant un
boîtier de magnétomètres et les moyens de calcul, pour élaborer les
composantes du champ magnétique et éventuellement de sa dérivée.
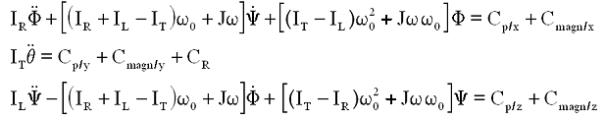
c) TMC appliqué en axes inertiels, projeté en axes
satellite:
Le lecteur utilisera la dérivation intermédiaire en axes
satellite

Finalement , sous une forme équivalente on a :

On voit alors apparaître au premier membre l'expression
classique du TMC appliqué au satellite et au second membre 2 termes supplémentaires
traduisant la présence de la roue en rotation.
|
|
Considéré
comme couple de commande de la roue sur le satellite qui agit
dès que la roue est accélérée en vitesse |
|
|
Classiquement
connu comme "couple gyroscopique" ou "réaction
gyroscopique" de toute roue à qui on impose une rotation non
coaxiale à la sienne. Ce
couple crée des couplages qui peuvent être gênants pour le SCA. |
C'est donc cette dernière équation qui sera le socle du SCA,
accompagnée de celle du comportement de la roue
c) Equations en axes satellites,
Ce calcul a déjà été réalisé sur le site, et donne cas
général
SANS ROUE :
1à
Sans roue, mais avec gradient de gravité.:
2à
Sans roue, sans gradient de gravité

REMARQUES :
On note que sans couples extérieurs, la stabilité du système
n'est acquise que si :

Les mouvements roulis-lacet sont couplés
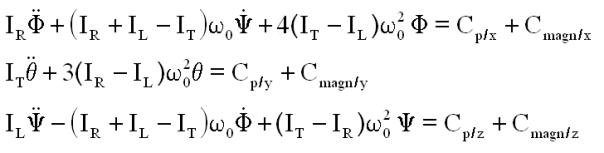
AVEC ROUE SUR
L'AXE TANGAGE:
On note Cr le couple de réaction de la roue
sur le satellite et w
la rotation relative
de la roue par rapport au satellite
1à
Avec roue et gradient de gravité, qui se réduit à sa
partie principale avec des axes principaux..

2à
Avec roue, sans gradient de gravité.
4°) ETUDE PARTICULIERE DES COUPLAGES GYROSCOPIQUES DUS A
LA ROUE:
Considérons un solide appelé "carter" ( içi le satellite ) comporte un gyroscope de moment d'inertie J. ( corps tournant à vitesse angulaire w autour de l'axe y )
THEOREME TRES GENERAL : EN PRESENCE D'UN GYROSCOPE ON PEUT CONSIDERER CE GYROSCOPE BLOQUE SUR SON CARTER( Rotation "oubliée" ), A CONDITION DE RAJOUTER AU MOMENT DES FORCES EXTERIEURES UN MOMENT SUPPLEMENTAIRE , LE COUPLE GYROSCOPIQUE, compensant les effets de la rotation "oubliée".
|
|
REGLE
DU PARALLELISME DES AXES DE ROTATION : " Lorsqu'un gyroscope est soumis à une rotation ( ou un moment ) imposée, il réagit en créant un couple gyroscopique et adoptant une rotation telle qu'elle ait tendance à 'envoyer' l'axe du gyroscope sur l'axe de la rotation imposée, ou encore à aligner son axe sur celui de la rotation transversale imposée". |
CONCLUSIONS :
La roue apporte 2 effets:
1 - Le couple Cg1 traduit les couplages roue-satellite, ce sont les termes que l'on retrouve devant les dérivées, d'ailleurs avec des signes opposés.

des équations en F et Y.
2 - Un couple Cg2 traduit le couplage avec le mouvement orbital, couplage qui entraîne que l'axe de la roue essaye de s'aligner sur l'axe de la rotation orbitale. En clair la rotation w y "veut s'aligner" sur woY. Avec comme conséquences:
Si w > 0 l'effet est stabilisant à coup sûr, ce qui se constante sur les termes suivants des équations en F et Y.

Si w < 0 l'effet est déstabilisant, car la roue tend à se retourner complètement, entraînant le satellite dans cette même opération. Il est probable que les bobines vont travailler plus. L'effet devrait être d'autant plus gênant que la roue tourne vite, sauf que la roue prendre une rigidité gyroscopique de plus en plus importante. En pratique l'étude réserve des surprises ( sauf erreur de ma part ).
Pour la suite, je préfère revenir à une équation d'état du satellite avec roue et gradient de gravité, de la forme matricielle :

Recherchons les valeurs propres, au nombre de 4 et complexes conjuguées 2 à 2. Comme le système libre est non dissipatif, les parties réelles devraient être nulles. Nous trouverons donc une équation caractéristique bicarrée avec 2 racines négatives, conduisant à deux pulsations propres seulement.
L'équation caractéristique s'écrit :

Le comportement du système dépend de la nature des racines, donc classiquement du produit P et de la somme S

La conclusion est immédiate et inattendue ( sauf erreur de ma part ) le satellite pourrait être instable avec une roue à vitesse réduite négative entre - 0.13 et - 1.81 rd/s.
Pourquoi? Problème à trancher?
RESULTATS CONFIRMES PAR LA SIMULATION libresat
REMARQUE : la zone est si étroite et la divergence si lente qu'elle ne devrait pas poser de problème lors de sa traversée, sauf dans un seul cas: la panne et le mode survie dans cette zone de vitesse.
RESULTATS DES SIMULATIONS
1°) Autour de la zone instable :
C'est le lacet qui est déstabilisé en premier
C'est le roulis qui est déstabilisé en premier

7


3°) EQUATION ROUE:
En négligeant, dans le mouvement rapide de la roue, les dérivées
premières et secondes des angles satellites ( mouvements lents ) on obtient une
équation du mouvement de la roue :
![]()
Ceci nous donne un lien entre le tangage et la roue, en négligeant
les perturbations petites au regard du couple roue

II UNE CHAINE POSSIBLE D'ASSERVISSEMENT DU TANGAGE SEUL
:
A - REMARQUES INITIALES :
-
Sous l'hypothèse
d'une matrice d'inertie diagonale, les oscillations libres du tangage sont découplées
du roulis-lacet.
-
A l'altitude 817
km et surtout un nanosatellite, le couple du gradient de gravité est très
faible, d'ailleurs l'oscillation libre sous gradient est très lente de
pulsation et période ( proche des caractéristiques orbitales ) :
![]()
-
Le contrôle par
roue suppose une surveillance par seuils de détection, donc en général non
continue, avec des actions de durée limitées et la mise en jeu d'un couple
important ( max 6 10-3 Nm)devant ceux des perturbations ( max vers 5
10-7Nm )ou du gradient de gravité ( 1.12 10-8 Nm).
- Donc lors du fonctionnement de la roue, on peut dans un premier temps, pour cerner les principaux paramètres, négliger toutes les actions sauf le couple roue.
-
On appellera qref
la valeur de référence ou de consigne du tangage, d'abord nulle pour une première
étude, mais pas forcément, en présence d'une perturbation qui risque de décaler
la valeur stabilisée du tangage.
-
On gardera à
l'idée le couple roue max Cmax= 6 10-3 Nm, et on choisit pour
commencer une régulation proportionnelle-dérivée, à partir d'un écart
important de 20°.
B - DONNEES NECESSAIRES :
Cext couple extérieur comprenant perturbations ( sans gradient de gravité
), et actuateurs internes ( magnétocoupleurs)
NB :On y intégrera donc le couple aérodynamique évalué,
sans autre précision, à un maximum de 3.6 10-8 Nm
T1
( par exemple 0.2 s ) retard pur de l'actionneur constitué de la roue
T2
( par exemple 0.5 s ) retard
pur de la détection de position, K2 gain des détecteurs
B(p) fonction de transfert détection position-vitesse
![]()
H(p) fonction de transfert du modèle satellite comprenant le terme du au
gradient de gravité

NB : On pourrait choisir H(p )= 28/(p²+W²)
= 28/p² , on
notera aussi que la période d'oscillation due au gradient de gravité est du même
ordre de grandeur que la période orbitale.
qref
consigne de référence en tangage
A(p) la fonction de transfert de la roue de réaction ( exemple pour
satellite Demeter ). Essayons d'en préciser
les caractéristiques:
Equation du mouvement :
![]()
On ne garde que le couple roue CR, et on choisit
une régulation proportionnelle-dérivée
![]()
Equation de comportement
Supposons que pour le dépointage maxi de 20°,
en début de fonctionnement, la roue
délivre 50% du couple max avec le rappel élastique, on a alors

Si on envisage une constante de temps de 1 mn soit t = 60 s,
on peut calculer F = 1.2 10-3 Nms
Introduction des retards :
On tiendra compte aussi du retard dans la chaîne de mesure
de l'angle de tangage ( valeur à préciser , T1=0.1 s choisi pour l'instant )
et du retard dans la restitution d'attitude ( valeur à préciser , T2 = 0.5 s
choisi pour l'instant )
Introduction du temps de réponse de la roue :
On adopte ( à défaut d'autre information ) un modèle de
roue du premier ordre avec la constante de temps T3 = 0.5 s ( à préciser avec
la documentation )
La commande sera donc de la forme

NB1 : Il faudra aussi mettre en place :
1 - Une coupure d'asservissement pour | q - qref
|< D ( à préciser )
2 - Un limiteur de couple roue afin de ne pas dépasser
le couple maximum
3 - Un module d'évolution de la vitesse w de la roue, en parallèle avec le simulateur ci-dessus
4 - Une simulation avec la matrice d'inertie réelle
pour "voir" l'influence des produits d'inertie qui doivent coupler les
3 mouvements.
******************************* Fin de
page *********************************