![]()
|
GRADIENT DE GRAVITE ( Solution ) |
|
|
|
|


![]()
Expression de la force élémentaire :
Nous traduisons simplement la force de gravitation élémentaire
sur la masse dm, soit
![]()
Expression du moment élémentaire :
La force df a un moment calculé en G qui vaut :
![]()
Développement limité du moment élémentaire :
L'idée est naturellement que r est très petit devant r ( r<<r donc r/r << 1) le développement limité à l'ordre 1, portera se fera par
rapport à r/r
Donc, on est amené à évaluer OM avec l'angle OGM = k
visible sur la figure, et on néglige (r/r)² devant r/r
![]()
![]()
![]()
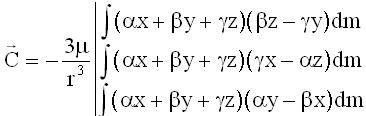
Ne reste plus qu'à revenir au moment élémentaire pour
obtenir l'expression souhaitée, d'abord du moment élémentaire:

puis du moment général résultant de l'intégration dans tout
le solide.

L'intégrale se laisse apprivoiser assez simplement, en
commençant par exprimer que G est centre d'inertie du solide soit ![]()
Puis avec les composantes de r
à ( ra rb rg ) et les coordonnées de r -> ( x y z ), et avec la définition de k, on a

On exploite enfin les connaissances classiques sur la matrice d'inertie principale soit d'abord avec les produits
d'inertie :

Expression avec une matrice d'inertie principale :
![]()
puis les moments d'inertie par rapport aux axes
classiquement nommés X de roulis, Y de tangage, Z de lacet
![]()
Explicitons le produit vectoriel

La fin du calcul fournie dans le texte devient :
|
|
|
|
|
Avec les angles
de Cardan ( RTL) =(Roulis-Tangage-Lacet) =( F, q, Y ), le calcul de a, b, g
cosinus directeurs de Z donne sur les axes principaux x y z du satellite

Le couple de gradient de gravité
vaut exprimé en axes satellite ( Voir les
angles de Cardan
sur ce site ):
avec la pulsation
orbitale

Pour de petits angles en contrôle d'attitude
notamment en ne gardant que les termes d'ordre 1
On remarquera que
l'exploitation du gradient de gravité nécessite notamment des moments d'inertie
bien différenciés , ce qui explique le déploiement de mâts avec des masses en
bouts de bras.
Expression avec une matrice d'inertie non diagonale (
ce que l'on fait rarement )
Si on reprend
l'intégrale générale, donnée plus haut :
Le lecteur
achèvera les calculs, en faisant cette fois-ci apparaître les produits
d'inertie.

Une façon
élégante de résumer ce calcul est ( le lecteur pourra le vérifier ) d'écrire le
couple gradient sous la forme :

Avec les
composantes a b g de Z( sur x y z )
On obtient :

formule dans
laquelle on retrouve le terme correspondant à la partie diagonale de la matrice
d'inertie et un terme complémentaire du aux produits d'inertie.
Cas des
petits angles :
NB : Il peut
sembler étonnant qu'avec des angles nuls ( repère XYZ = repère xyz), il reste
un couple de gradient de gravité constant, entraînant qu'un équilibre est
impossible avec une matrice d'inertie non diagonale.
Peut-on imaginer
une attitude conduisant à un couple nul? Si tel est le cas, les angles q et Y doivent
vérifier 3 équations, ce qui laisse supposer ( je n'ai pas fait le calcul ) que
c'est impossible, car il faudrait que la matrice d'inertie vérifie des
relations trop particulières !!.
Si quelqu'un a un
avis sur cette question, qu'il me le communique!!
![]()
Guiziou Robert novembre 2013